Un equipo de ingenieros puso en marcha un ensayo de campo en el que comprobó las capacidades de tres vehículos exploradores autónomos sobre un terreno similar al marciano en el desierto del Sáhara.
Desde que se lograra el primer aterrizaje en Marte en los años setenta del siglo pasado, la comunidad científica ha trabajado con denuedo para ampliar los conocimientos que se poseen sobre el planeta rojo. El primer explorador que consiguió aterrizar y llevar a cabo su misión en Marte fue el Sojourner, en julio de 1997. Otros tres robots le sucedieron en la exploración de la superficie del planeta con los que se recopiló información sobre agua, rocas, suelos y minerales, así como sobre la presencia de compuestos orgánicos.
Científicos del proyecto financiado con fondos europeos PERASPERA abordaron el reto de crear exploradores capaces de recorrer distancias mayores en un día, tomar decisiones y colaborar con otros exploradores para acceder a emplazamientos de difícil acceso. Coordinado por la Agencia Espacial Europea (ESA), el proyecto realizó recientemente el ensayo de campo europeo con vehículos exploradores de mayor envergadura en el que participaron cuarenta ingenieros. Las pruebas se llevaron a cabo en el norte del desierto del Sáhara en Marruecos, donde se considera que el suelo se parece más al de Marte.
Del laboratorio al terreno
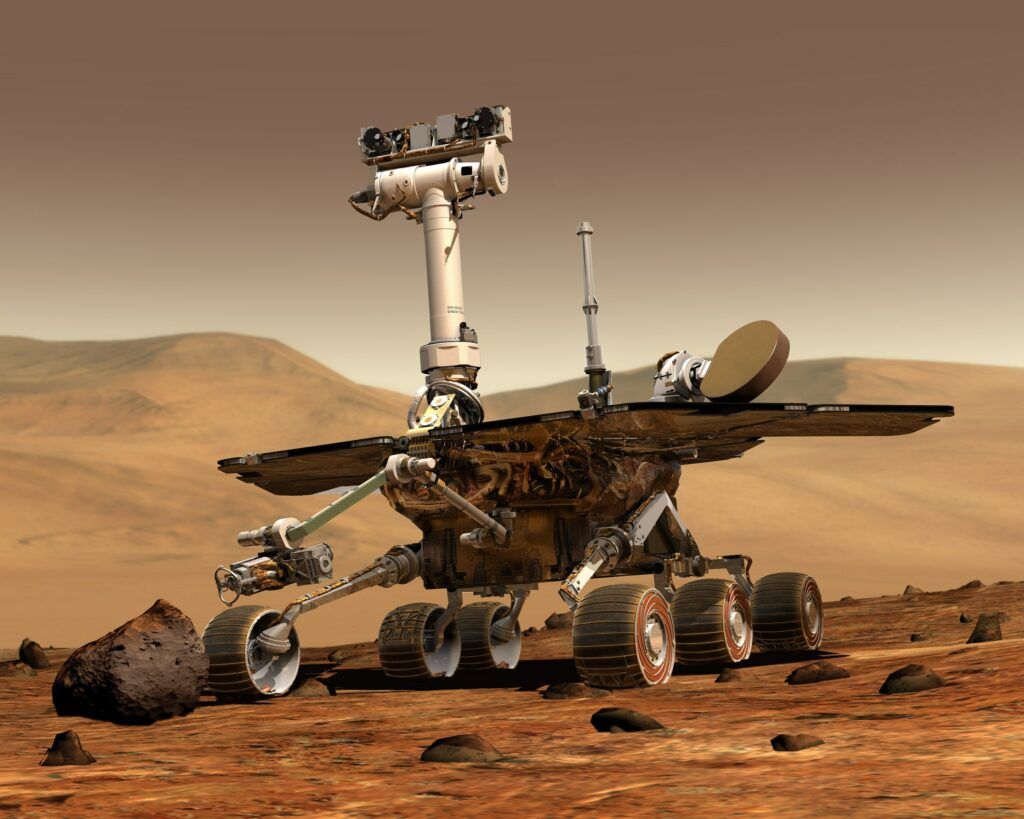
Durante dos semanas se probaron tres exploradores autónomos Mana Minnie y SherpaTT para comprobar si funcionarían adecuadamente en un entorno similar al de Marte. Los sistemas de navegación automática desarrollados se probaron en cinco emplazamientos distintos.
Los exploradores del futuro
Uno de los exploradores, el SherpaTT, se desplazó 1,3 km con total autonomía. De hecho, tras detectar varias rocas con formas extrañas, ordenó al planificador principal que procediera a realizar una maniobra de recolocación a fin de obtener más imágenes. La autonomía demostrada por el explorador en cuanto a desplazamientos largos y toma de decisiones es fundamental para las futuras misiones a Marte.
PERASPERA (PERASPERA (AD ASTRA) Plan European Roadmap and Activities for SPace Exploitation of Robotics and Autonomy) concluirá en 2019. El proyecto ha logrado, entre otros objetivos, desarrollar sistemas robóticos y tecnologías fundamentales destinadas a labores de asistencia satelital en órbita y exploración planetaria. Los resultados del proyecto se implementarán en una misión espacial robótica orbital planeada para 2023.
Más información
Sitio web del proyecto PERASPERA



Deja una respuesta